


Page -

![]() synchro
synchro
Echtzeitsynchronisation
Koordinator
Frank Ellinger/Martin Kreißig
TU Dresden
Projektpartner

TU Dresden
Analoge ICs für Datenkommunikation, IC-Demonstrator, Koordination

MAZ Brandenburg GmbH
Mixed-Signal-ASIC Design, industrielle Motoransteuerung, Feldbuskommunikation, Synchronisations-IC-Demonstrator

eonas GmbH
Design und Entwicklung für automobile Elektromotoranwendungen

MeDes Industrial Design
Entwicklung von Elektrofahrzeugen, Prototypenbau, Erprobungen, publikumswirksamer Fahrzeugdemonstrator
Kontakt
Entwicklung eines universell einsetzbaren Chips für die Echtzeitsynchronisation mit
Genauigkeit bis 1 ns, Echtzeitsynchronisierung von Elektromotoren, sowie ein elektrischer, mehrradangetriebener Fahrzeugdemonstrator.
Problemstellung & Stand der Technik
 Problemraum Elektrofahrzeuge
Problemraum Elektrofahrzeuge
- Synchronisation Radnabenmotoren bisher nicht zufriedenstellend
- Führt zu unsicheren Fahrverhalten bei Fahrzeugen mit kleinen Radständen
- Präzise Antriebssynchronisation und darauf abgestimmte neuartige Motoransteuerkonzepte zur Stabilisierung erforderlich 4/11
- Als Grundlage wird echtzeitfähige Datenübertragung mit Hardwareunterstützung zur Erhöhung der Synchronisationsgenauigkeit benötigt
Problemraum Synchronisierung
- Fahrzeugnetze: LIN, CAN oder Flexray:
- Datenraten mit 1 – 10Mbit zu gering für fortschrittliche Steuerungen
- GBit-Ethernet: zu hohe Latenz wegen aufwendiger Signalverarbeitung
- Konzepte für Synchronisations-ICs in Elektromotoren existieren, aber
- Lediglich Kompensation Latenzen Kommunikation
- Latenzen z.B. von Ansteuerung & Auswertung nicht kompensiert
→ Genauigkeit limitiert
- Sehr hohe Synchronisationsgenauigkeit von etwa 1 ns für gekoppelten Motoren benötigt, um
- Effizienz zu steigern, da langsamerer Motor als Last wirkt
- z.B. Durchsatz in Druckmaschinen zu steigern, sonst reißt Papier
Technische Ziele & Lösungen
Entwicklung von
- Universell einsetzbarem CMOS-IC für Synchronisierung mit sehr hoher Genauigkeit von 1 ns
- Betrachtung Zeitunterschied, Latenzoffsets werden eliminiert
- Echtzeitfähige Motorensteuerung
- Leichtbaufahrzeug mit elektrischen Radnabenmotoren (Einzelradantrieb, klassischer Antriebstrang fällt weg)
- Anspruchsvolle Demo-Plattform
- Eigenständiges Produkt
Innovationen & Ergebnisse
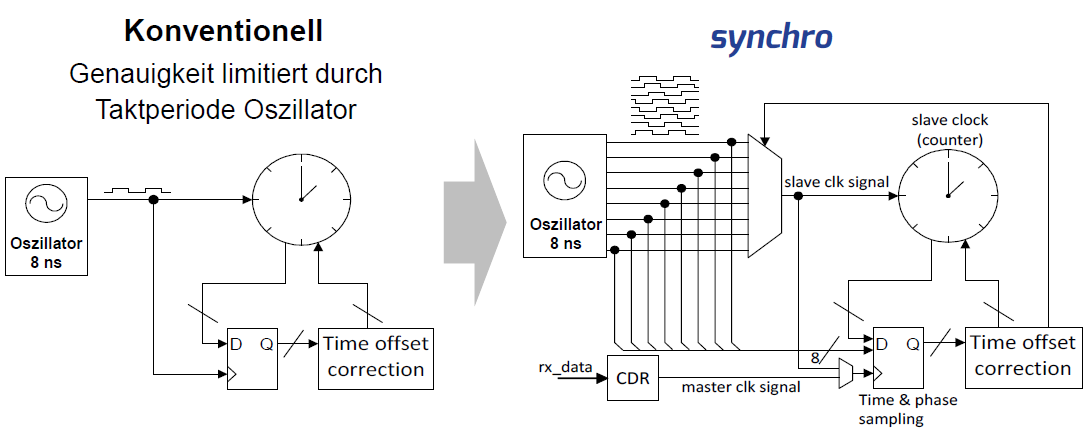
- CMOS IC auf Basis eines Phaseninterpolationsansatzes
- Bekannt von PLL/CDR aber neu für Zeitsynchronisation
- Plausibilitätsstudie PHY-IC, Dissertation Richter, Paper IMOC 11/2015
Markt und sozialer Einfluss
fast synchro hat ein hohes Marktpotential im Verhältnis zum Förderbetrag.
- ökologisch: z.B. Senkung Energieverbrauch, leisere Städte
- sozial: z.B. erhöhte Seniorenmobilität
Projektübergreifende Kooperation
- Erkenntnisse Synchronisations-ICs an fast carnet
- Synchronisations-IC Erkenntnisse an fast access
- fast traffic kann Forschungsergebnisse am Demonstrator testen
- Unterstützung von fast access beim ASIC Entwurf
- Erkenntnisse über drahtgebundene lokale Netzwerke von fast carnet
- Erkenntnisse zum Auslesen von Car-to-X-Daten von fast traffic